soncenos.blogspot.com
降りたい場所に降りる技術
21世紀に入り、日本の「かぐや」をはじめとして月に関する多くの高精度な科学データを得られるようになっています。こうした科学データは月面着陸探査にパラダイムシフトを起こしつつあります。すなわち、「降りられる場所に降りる」探査から「降りたい場所に降りる」探査へのシフトです。
これまでの着陸探査では地上の軌道決定結果などをもとに着陸点へ誘導していましたが、この方式ではkmオーダの着陸誤差が生じます。結果として「それくらいの誤差が生じても大丈夫な場所」として月の海などの比較的平坦で障害物の少ない場所に降りるのが一般的でした。しかし、これからの探査では険しい地形の場所にも安全に着陸できることが求められ、一桁高い精度が必要となってきました。SLIMプロジェクトではこれを実現するために長年ピンポイント着陸技術を開発してきました。その主なキー技術は、探査機の目である「画像照合航法」と、探査機の頭脳である「航法誘導制御」です。本稿ではSLIMが降りようとしている場所と、このピンポイント着陸技術について紹介します。
SLIMの目指す場所
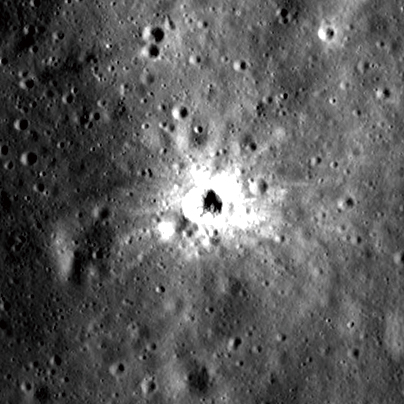
月の東側、赤道の少し南側に「神酒(みき)の海」があります。そこを拡大するとひときわ白く明るく見える直径300 mほどのクレータがあります(図1)。これがSLIMの目指す「SHIOLI*」クレータです 。
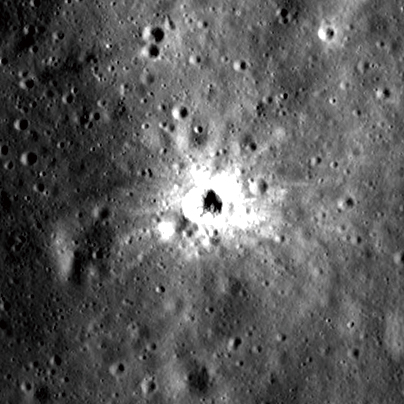
図1:SLIM着陸目標地点周辺のようす(3 km四方)。中央付近の明るいクレータが「SHIOLI」。©SELENE/JAXA
SHIOLIは比較的新しく形成されたクレータであると考えられます。また、「かぐや」の観測データから、SHIOLIの放出物にはカンラン石が多く含まれていることがわかっています。SLIMは着陸後、近赤外マルチバンド分光カメラを利用して、カンラン石の組成推定を試みます。カンラン石中の鉄とマグネシウムの比率は、マントルを作り出したマグマの海の組成情報を反映していると考えられ、月形成時の材料やその後の進化を考える上で非常に重要なパラメータです。
一方で、科学者が観測したいクレータの放出物などの観測対象は、一般的に工学の観点では近寄りたくない「障害物」として認識されます。もし大きな石を踏んでしまったら安全に着陸できない可能性があるからです。着陸後に放出物が観測可能な視野範囲に十分あり、かつ着陸に適した安全な場所、というのは限られています。こうした場所へ正確に降りるには高度な着陸技術が必要になります。
* SLIM で実証を目指す高精度着陸技術は、月探査の新時代を切り開くことが期待されています。SLIM が、歴史のターニングポイントに挟まれる「栞(しおり)」となるよう願いを込めて、名付けました。
どのように降りるか? SLIMの着陸降下シーケンス
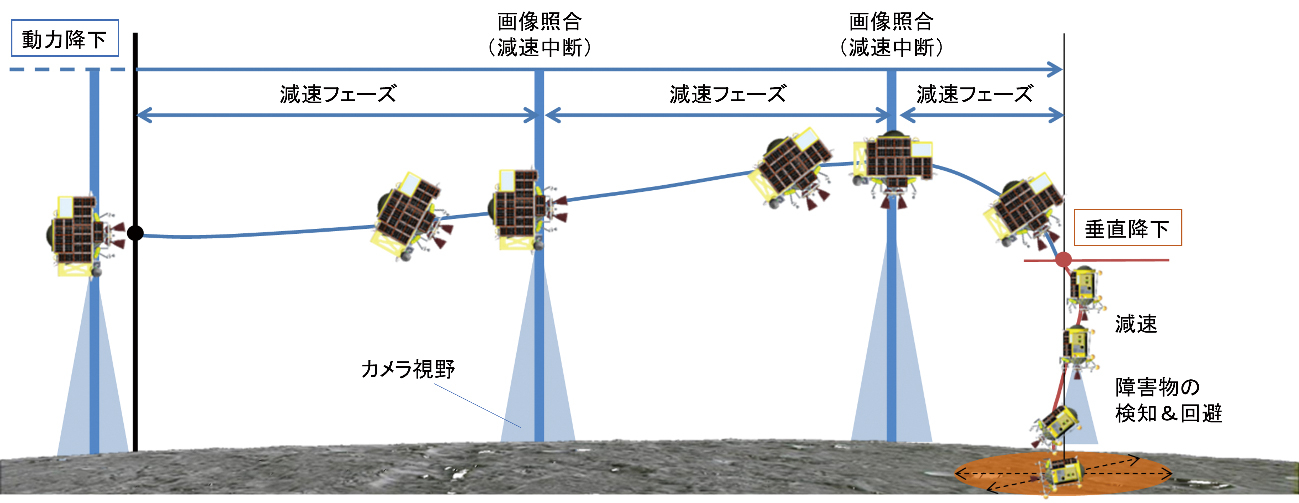
SLIMの着陸降下シーケンスを見てみましょう(図2)。SLIMは1,000km近い距離を飛行しながら約20分間減速を続け、精度100m以内で着陸します。日本上空で例えると、北海道の新千歳空港を秒速約1.7kmの速度(飛行機の数倍の速さ!)で出発し、兵庫県の阪神甲子園球場内(100m以内)にピンポイント着陸するイメージです。SLIMプロジェクトでは、減速を開始してから目標地点上空に探査機を誘導する段階を「動力降下フェーズ」、続いて月面までの距離や速度をより正確に把握しながら降下を継続し、軟着陸を行う段階を「垂直降下フェーズ」と呼んでいます。
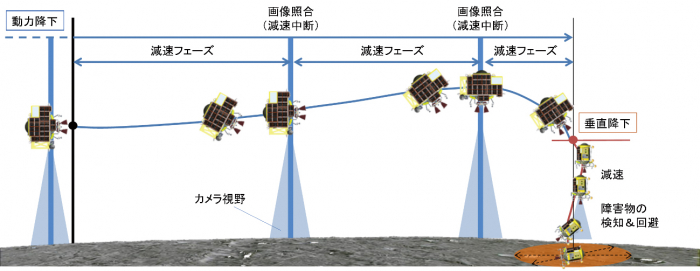
図2:SLIMの月着陸降下シーケンス。
SLIMのカギとなる技術をさらに掘り下げて見ていきましょう。
探査機のスマートな目、 画像照合航法・障害物検知
もしあなたが地図を一枚だけ持って知らない町にいて、ある場所へ行きたいとしたら、きっと自分の周りにある建物などの目印が地図上のどこにあたるかを探すことで、自分がどこにいるか知ろうとするのではないでしょうか。これと同じことを月でやろうというのが、SLIMのキー技術のひとつである「画像照合航法」です。SLIMの場合、目印は月面上に無数に存在するクレータ、目は航法カメラ、そして地図から探すのは探査機自身です。
画像照合航法は主に①クレータデータベース、②クレータ抽出、③クレータマッチングという3つの要素で構成されます。
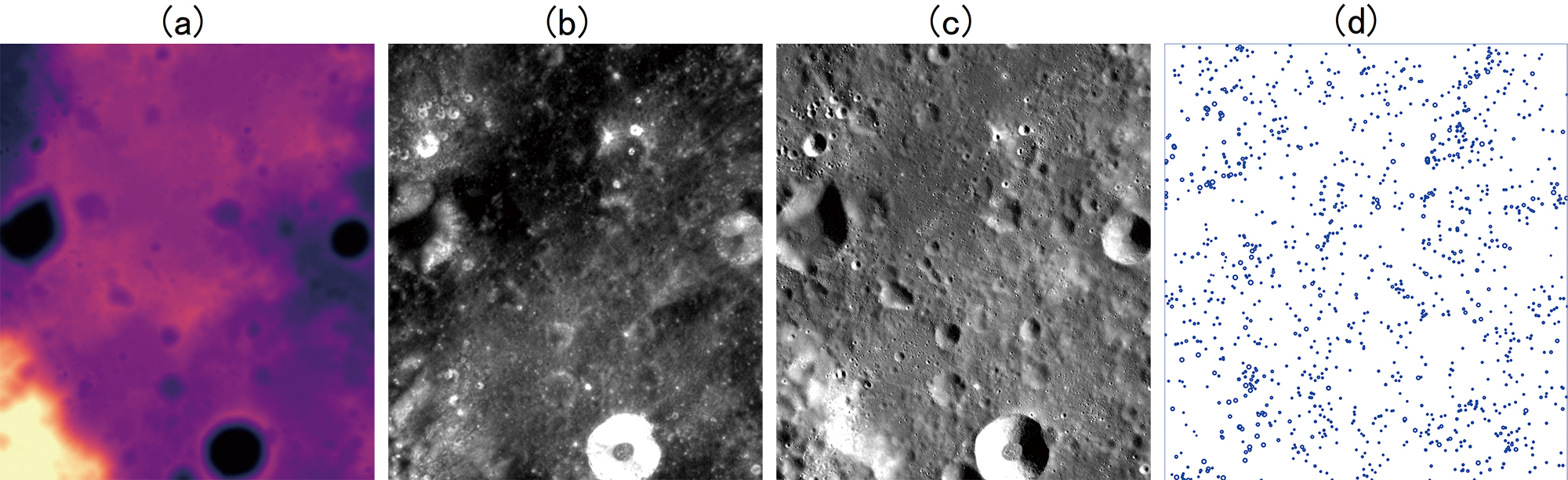
①クレータデータベースとは、地上で事前に用意するクレータ地図です。SLIMは着陸の際画像照合航法を行う領域ごとに専用のクレータ地図を搭載しています。図3のように、かぐやなどから得たデータをもとに、クレータを抽出してデータベース化します。
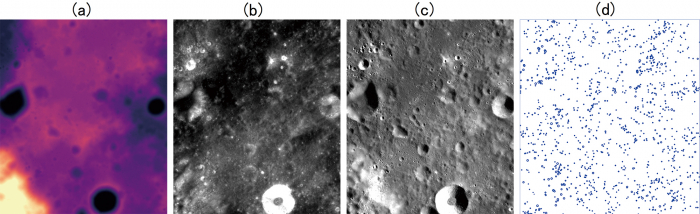
図3:クレータデータベースとその元となるデータの一例。左から(a)数値地形モデル、(b)反射率マップ、(c)a,bを使って作成した模擬月面画像、(d)cから抽出したクレータの中心位置を示したデータベース。
②クレータの抽出には過去の月面探査機で観測した数多くのクレータ画像から主成分分析を用いて抽出した主成分ベクトルをクレータのテンプレート画像として使い、テンプレートマッチングする手法[1]を用います。着陸降下中にも航法カメラで撮像した画像から同じ手法でクレータを抽出します。この画像処理手法は画像の明るさの変動といったノイズに強く、かつ低計算量で処理時間も短いため、探査機への搭載に適しています。
③抽出されたクレータはマッチング処理部[2][3]に入力され、搭載されたクレータデータベース内で一致するパターンを探索します。画像ではなくクレータの位置情報を用いて探索するため、精度を保ったまま少ない計算量で処理することが可能です。また、クレータの誤検出・未検出にも強い手法になっています。
垂直降下の終盤には同じ航法カメラを用いて障害物検知[4]を行います。SLIMが安全に着陸するには高さ15cm程度の大きさの石まで識別し、回避する必要がありますが、画像中の局所的な明るさの変化を特徴量とすることで、そうした石を短時間で識別することが可能です。危険と識別された障害物の分布から視野内で最も安全な着陸地点を自動で探索し、SLIMは月面へと降りていきます。
これらの画像処理技術は明治大学の鎌田 弘之教授、電気通信大学の髙玉 圭樹教授、東京都立大学の小島 広久教授とISASが長年かけて開発してきたものです。これらの技術がもうすぐSLIMミッションによって実用化されようとしています。
複数センサから現在の位置や速度を推定する「航法技術」
航法とは、自分の現在位置や速度などを正しく知る機能を指します。画像照合航法(カメラ)を通してSLIMは「ある瞬間の時刻」における位置情報を正確に知ることができます。SLIMのカメラ(基軸方向と側面方向に2台搭載)は機体に固定されています。画像照合を行うにはどちらかのカメラを月面に対して正対させて撮影する必要があります。ただ減速中は飛行制御に基づいて姿勢を決めるので、減速中はカメラが月面を向いているとは限りません。このため、減速を中断して機体を回転させて月面を撮影し、再度回転させて減速を再開する動作を何回か繰り返す予定です(図2)。ではカメラを使用できない期間は、どのように自身の位置や速度を把握するのでしょうか?ここで活躍するのが「複合航法」と呼ばれる、複数のセンサ情報を統合処理して位置速度などを推定する演算技術です。
SLIMには、画像照合航法を行うカメラに加えて、機体の加減速を計測する「加速度計」が搭載されています。従って、画像照合航法が推定した「(ある瞬間時刻の)正確な位置情報」を起点として、その後は加速度計の「加減速情報」を積分することで、探査機は常に高精度な位置速度を把握できます。また、月面との距離や速度を計測することが可能な「着陸レーダ」、近距離での距離計測が得意な「レーザ測距計」、探査機の姿勢を計測する「恒星センサ」や「ジャイロセンサ」など、多数のセンサが搭載されています。高精度月着陸では、降下中の場面に応じて、特徴が異なるセンサをいかに上手く使い分けて降下するのかがポイントです。
その場で軌道を作り、目標地点へと導く「誘導制御技術」
誘導制御とは、自身の現在位置や速度と目標地点に到達するための経路(軌道)を比較し、ずれがなくなるように修正する機能を指します。高精度月着陸を達成するためには、画像照合航法からわかる位置誤差を修正する能力に加えて、燃料が枯渇しないうちに素早く降りることも大切です。「精密に」かつ「素早く」到着したいという相反する要望は、車で例えると、全開アクセルor 急ブレーキのみを用いた豪快な運転で、目標地点にピタリと駐車するイメージです。このような難易度の高い芸当が、SLIMの誘導制御には求められていました。
この課題は、現在地点から目標地点に到達する最適経路をその場で計算し、計算した経路周辺で更なる微修正を行うことで、解決が図られています。再び車で例えると、カーナビの道案内機能が「誘導」、ドライバーのハンドルやアクセルの操作が「制御」に相当します。中でも道案内機能に相当する「誘導則」の性能がカギであり、日本の大学研究者とISASが一体で研究に取り組んできました。
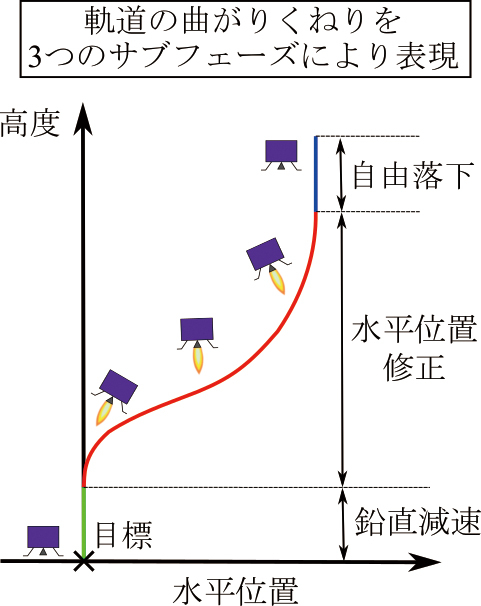
動力降下、垂直降下フェーズそれぞれに対して誘導則を構築しています。動力降下では、横浜国立大学の上野 誠也教授・樋口 丈浩准教授が主導される研究室との長年に渡る共同研究を通じて築かれた「多項式誘導則」が搭載されています。多項式誘導則は、探査機が飛行する軌道を多項式(例:χ2 + 2χ + 3 のように、数字と文字の足し算・掛け算からなる式)で表現し、この軌道解をリアルタイムで計算する方式です。アポロ計画で採用された月降下誘導則にも通ずる手法です。軌道が多項式で表現しやすい場合、つまり比較的長い距離を長い時間かけて飛行するフェーズに適した誘導則と言えます。一方、垂直降下フェーズでは、より短時間で大きな位置修正を行う必要があること、これに伴い目標地点に辿り着く軌道が必ずしも多項式で表現しきれない、曲がりくねりの大きい軌道になるなど、特有の配慮が必要でした。研究を重ねた末、「自由落下」「水平位置修正」「鉛直減速」の3つのサブフェーズの順に飛行するように区間を分割し(図4)、各区間で生成した軌道を結合する方式を考案することで、解決しました。
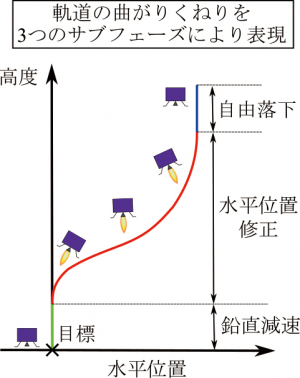
図4:SLIM垂直降下誘導則の概要。
終わりに
SLIMは、挑戦的かつ科学的価値の高いSHIOLIクレータに確実に着陸するために、精度よく自分の位置を知る「スマートな目」と、目標地点への経路を自律的に導き出し飛行する「優れた頭脳」を併せ持った探査機です。世界でも例を見ない高精度月着陸の実現に向けて、チーム一丸となって奮闘しているところです。どうか応援のほど、宜しくお願い致します。
【参考文献】
[1] 岡田 怜史、中浜 優佳、森部 美沙子、他、主成分分析によるクレータ座標・サイズの検出とその評価、航空宇宙技術、Vol. 17 , pp. 61 -67 , 2018
[2] 石井 晴之、村田 暁紀、上野 史、他、相似な三角形に基づくクレータマッチングによるSLIM 探査機の自己位置推定とその精度向上、航空宇宙技術、Vol. 17 , pp. 69 - 78 , 2018
[3] 狩谷 和季、石田 貴行、澤井 秀次郎、他、高精度月着陸のためのクレータで構成する線分情報を用いた位置推定手法とその評価、航空宇宙技術、Vol. 17 , pp. 79 - 87 , 2018
[4] 久我 共生、小島 広久、福田 盛介、小型月着陸機のための画像を用いた安全着陸領域識別に関する研究、日本航空宇宙学会論文集、Vol. 64, No. 6, pp. 303-309, 2016
【 ISASニュース 2022年9月号(No.498) 掲載】
Adblock test (Why?)
からの記事と詳細 ( SLIMの月面ピンポイント着陸技術 | 宇宙科学研究所 - JAXA 宇宙科学研究所 )
https://ift.tt/WQbcPIG
科学&テクノロジー






























更新日:2022年10月01日